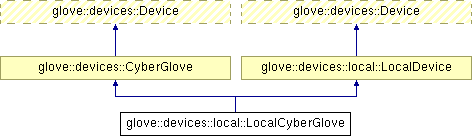
glove::devices::local::LocalCyberGlove Class Reference
#include <LocalCyberGlove.hpp>
Public Member Functions | |
| LocalCyberGlove (const std::string &port) | |
| virtual | ~LocalCyberGlove () |
| virtual bool | connect () |
| virtual bool | disconnect () |
| virtual bool | isConnected () |
| virtual unsigned int | numSensors () |
| virtual bool | isRightHanded () |
| virtual bool | isLeftHanded () |
| virtual void | enableSwitch (const bool b=true) |
| virtual bool | isSwitchEnabled () |
| virtual void | requestGloveStatus (const bool b=true) |
| virtual bool | gloveStatusRequested () |
| virtual const std::bitset< 24 > | getEnabledSensors () |
| virtual void | setSensorMask (std::bitset< 24 > mask) |
| virtual void | streamSensorValues (bool b) |
| virtual bool | isStreaming () |
| virtual double | getValue (const Sensor s) |
| virtual const std::vector< double > | getValues () |
| virtual void | cancel () |
| virtual void | restart () |
| virtual void | reinitialize () |
| virtual std::string | info () |
| virtual std::pair< int, int > | version () |
| virtual bool | runTest (const bool fullTest=false, std::ostream *s=NULL) |
| virtual const std::string & | getTypeIdentifier () const |
| virtual std::string | toString () |
Friends | |
| class | LocalDeviceManager |
Detailed Description
Implements a CyberGlove abstraction to the glove's control unit.
- Date:
- 2009-2010
Constructor & Destructor Documentation
| glove::devices::local::LocalCyberGlove::LocalCyberGlove | ( | const std::string & | port | ) |
The constructor.
- Exceptions:
-
std::illegal_argument If the given port is obviously not valid (empty).
- Parameters:
-
port The serial port to connect to.
| virtual glove::devices::local::LocalCyberGlove::~LocalCyberGlove | ( | ) | [virtual] |
The destructor.
Member Function Documentation
| virtual void glove::devices::local::LocalCyberGlove::cancel | ( | ) | [virtual] |
Cancel the current operation performed by the glove's control unit.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
| virtual bool glove::devices::local::LocalCyberGlove::connect | ( | ) | [virtual] |
| virtual bool glove::devices::local::LocalCyberGlove::disconnect | ( | ) | [virtual] |
| virtual void glove::devices::local::LocalCyberGlove::enableSwitch | ( | const bool | b = true |
) | [virtual] |
Enables the switch on the wrist of the glove. The state of the switch is indicated by a LED on the switch.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
- Parameters:
-
b A boolean value for dis-/enabling the switch.
| virtual const std::bitset<24> glove::devices::local::LocalCyberGlove::getEnabledSensors | ( | ) | [virtual] |
- See also:
- CyberGlove::getEnabledSensors()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
| virtual const std::string& glove::devices::local::LocalCyberGlove::getTypeIdentifier | ( | ) | const [virtual] |
| virtual double glove::devices::local::LocalCyberGlove::getValue | ( | const Sensor | s | ) | [virtual] |
- See also:
- CyberGlove::getValue(Sensor s)
- Exceptions:
-
std::invalid_argument If the CyberGlove::Sensor id is out of range. std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
| virtual const std::vector<double> glove::devices::local::LocalCyberGlove::getValues | ( | ) | [virtual] |
- See also:
- CyberGlove::getValues()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
| virtual bool glove::devices::local::LocalCyberGlove::gloveStatusRequested | ( | ) | [virtual] |
Returns the current setting for including the glove status byte in the sensor record.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
- Returns:
- The current setting for including the glove status byte in the sensor record.
| virtual std::string glove::devices::local::LocalCyberGlove::info | ( | ) | [virtual] |
- See also:
- CyberGlove::info()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
| virtual bool glove::devices::local::LocalCyberGlove::isConnected | ( | ) | [virtual] |
| virtual bool glove::devices::local::LocalCyberGlove::isLeftHanded | ( | ) | [virtual] |
- See also:
- CyberGlove::isLeftHanded()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
| virtual bool glove::devices::local::LocalCyberGlove::isRightHanded | ( | ) | [virtual] |
- See also:
- CyberGlove::isRightHanded()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
| virtual bool glove::devices::local::LocalCyberGlove::isStreaming | ( | ) | [virtual] |
Indicates if the glove is currently streaming or not.
- Returns:
- A boolean value that indicates if the glove is currently streaming or not.
Implements glove::devices::CyberGlove.
| virtual bool glove::devices::local::LocalCyberGlove::isSwitchEnabled | ( | ) | [virtual] |
Indicates if the switch on the wrist of the glove is enabled.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
- Returns:
- A boolean value that indicates if the switch is enabled or not.
| virtual unsigned int glove::devices::local::LocalCyberGlove::numSensors | ( | ) | [virtual] |
- See also:
- CyberGlove::numSensors()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
| virtual void glove::devices::local::LocalCyberGlove::reinitialize | ( | ) | [virtual] |
Reinitialize the glove's control unit.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
| virtual void glove::devices::local::LocalCyberGlove::requestGloveStatus | ( | const bool | b = true |
) | [virtual] |
Requests the glove's status byte to be included in the sensor record.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
- Parameters:
-
b A boolean value for dis-/enabling this behavior.
| virtual void glove::devices::local::LocalCyberGlove::restart | ( | ) | [virtual] |
Restart the glove's control unit.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
| virtual bool glove::devices::local::LocalCyberGlove::runTest | ( | const bool | fullTest = false, |
|
| std::ostream * | s = NULL | |||
| ) | [virtual] |
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Reimplemented from glove::devices::local::LocalDevice.
| virtual void glove::devices::local::LocalCyberGlove::setSensorMask | ( | std::bitset< 24 > | mask | ) | [virtual] |
Set the sensor mask according to the following table:
0: Thumb, oppose 1: Thumb, proximal joint 2: Thumb, distal joint 3: Thumb, abduction 4: Index finger, metacarpal joint 5: Index finger, proximal joint 6: Index finger, distal joint (only for 22-sensor gloves) 7: reserved (Index finger, abduction) 8: Middle finger, metacarpal joint 9: Middle finger, proximal joint 10: Middle finger, distal joint (only for 22-sensor gloves) 11: Middle finger, abduction 12: Ring finger, metacarpal joint 13: Ring finger, proximal joint 14: Ring finger, distal joint (only for 22-sensor gloves) 15: Ring finger, abduction 16: Pinky, metacarpal joint 17: Pinky, proximal joint 18: Pinky, distal joint (only for 22-sensor gloves) 19: Pinky, abduction 20: Palm arch 21: Wrist pitch 22: Wrist yaw 23: reserved
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
- Parameters:
-
mask The sensor mask
| virtual void glove::devices::local::LocalCyberGlove::streamSensorValues | ( | bool | b | ) | [virtual] |
Dis-/Enables streaming sensor values at fixed rate.
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
- Parameters:
-
b A boolean value for dis-/enabling streaming.
| virtual std::string glove::devices::local::LocalCyberGlove::toString | ( | ) | [virtual] |
- See also:
- CyberGlove::toString()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::Device.
| virtual std::pair<int, int> glove::devices::local::LocalCyberGlove::version | ( | ) | [virtual] |
- See also:
- CyberGlove::version()
- Exceptions:
-
std::runtime_error If the device isn't connected or currently streaming. If the device is streaming sensor values it doesn't accept new command until the streaming was stopped. boost::system::system_error If the low-level communication to device failed.
Implements glove::devices::CyberGlove.
The documentation for this class was generated from the following file:
- src/glove/devices/local/LocalCyberGlove.hpp
